[preprint] Infinite-Dimensional Closed-Loop Inverse Kinematics via Neural Operators
In robotics, 𝘤𝘭𝘰𝘴𝘦𝘥-𝘭𝘰𝘰𝘱 𝘪𝘯𝘷𝘦𝘳𝘴𝘦 𝘬𝘪𝘯𝘦𝘮𝘢𝘵𝘪𝘤𝘴 are an efficient tool to position the end-effector of rigid manipulators in space - but they quickly encounter limits with soft robots, where not all configurations are attainable through control action. And also, what if we want to reason about the 𝘦𝘯𝘵𝘪𝘳𝘦 𝘴𝘰𝘧𝘵 𝘳𝘰𝘣𝘰𝘵 𝘴𝘩𝘢𝘱𝘦 while solving tasks, not just the end-effector? 🐘 🐙
Check out our new preprint “𝗜𝗻𝗳𝗶𝗻𝗶𝘁𝗲-𝗗𝗶𝗺𝗲𝗻𝘀𝗶𝗼𝗻𝗮𝗹 𝗖𝗹𝗼𝘀𝗲𝗱-𝗟𝗼𝗼𝗽 𝗜𝗻𝘃𝗲𝗿𝘀𝗲 𝗞𝗶𝗻𝗲𝗺𝗮𝘁𝗶𝗰𝘀 𝗳𝗼𝗿 𝗦𝗼𝗳𝘁 𝗥𝗼𝗯𝗼𝘁𝘀 𝘃𝗶𝗮 𝗡𝗲𝘂𝗿𝗮𝗹 𝗢𝗽𝗲𝗿𝗮𝘁𝗼𝗿𝘀” 👉 https://lnkd.in/dDE9GjY4 👈
This wraps up an amazing postdoc year at Stanford University in Ellen Kuhl’s Living Matter Lab, and a fantastic collaboration with Cosimo Della Santina (that came with a nice visit to beautiful TU Delft last fall 🇳🇱)
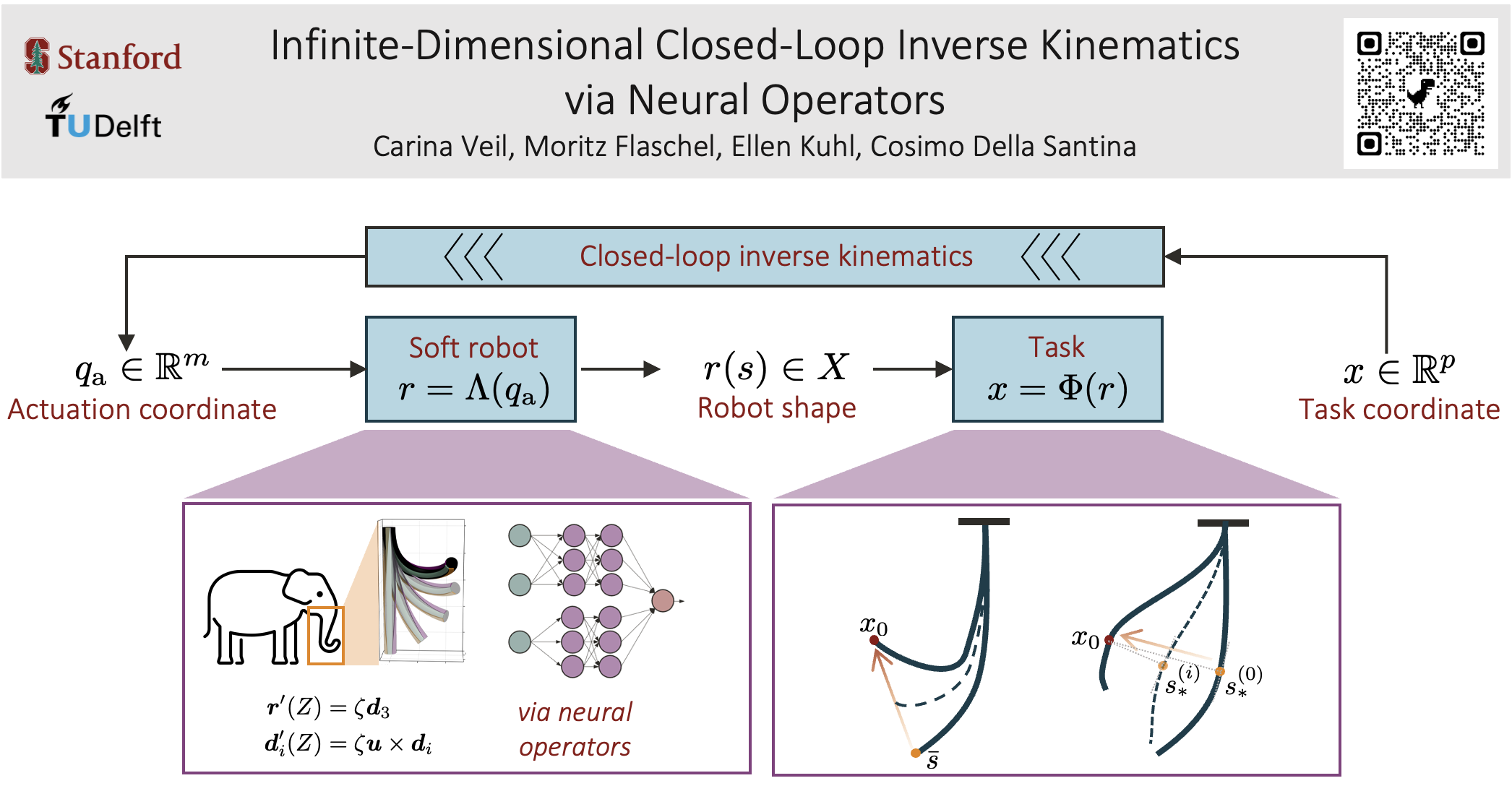
In the paper, we extend CLIK to infinite-dimensional shape spaces by composing an actuation-to-shape map with a shape-to-task map, deriving the differential end-to-end kinematics via an infinite-dimensional chain rule. Since this actuation-to-shape mapping is rarely available in closed form, we propose to learn it using differentiable 𝘯𝘦𝘶𝘳𝘢𝘭 𝘰𝘱𝘦𝘳𝘢𝘵𝘰𝘳 𝘯𝘦𝘵𝘸𝘰𝘳𝘬𝘴 - et voilà, CLIK for soft robots and reasoning about entire shapes rather than just end-effectors. 🥳create a patient-specific vascular fingerprint that we can use for navigation, basically like a roadmap helping surgeons find their way back to important spots.
📃 Link: arXiv
ℹ️ More about this project: Soft Robots