[preprint] Graph-based path planning for soft robots
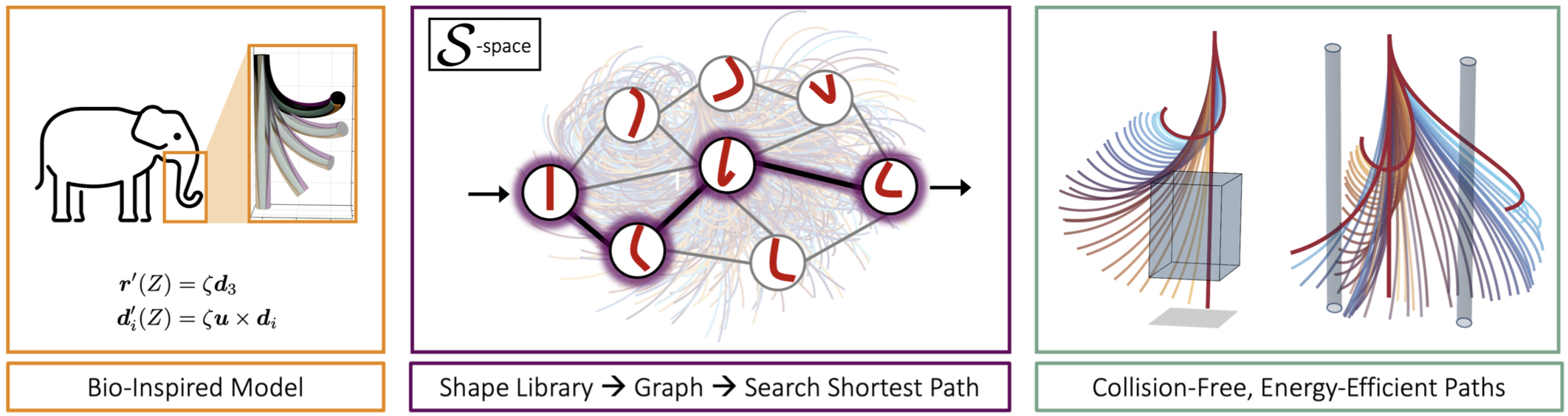
Elephants have perfected the art of multitasking with their trunks: like a biological Swiss army knife, they can bend, twist, and elongate in ways that rigid robots cannot. Interested in how we can use biomechanical insights for soft robotics? Check out our new preprint ``Shape-space graphs: Fast and collision-free path planning for soft robots’’.
📃 Link: arXiv
ℹ️ More about this project: Control of trunk-inspired soft robots
This was a great collaboration between Stanford University and FAU Erlangen-Nürnberg with Ellen Kuhl and Moritz Flaschel.